工业机器人是一种能够自动执行任务的机械装置,通常具备多个自由度和灵活的操作能力。它们使用各种传感器和执行器,通过计算机控制系统实现精确的运动和操作,下面介绍工业机器人的基本原理。
1、结构与关节
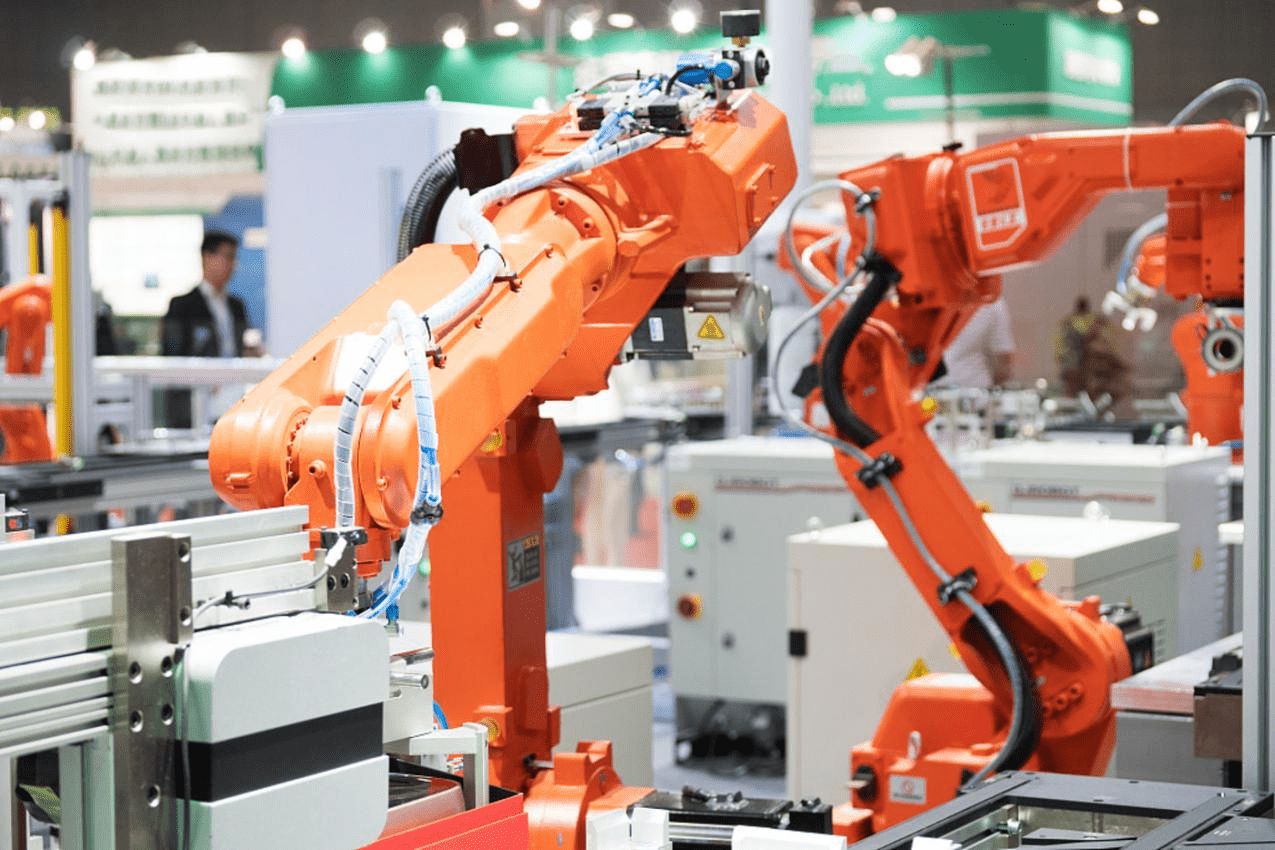
工业机器人的结构通常采用关节式结构,类似于人的骨骼系统。机器人的主要组成部分包括机械臂、关节、执行器和末端执行器。机械臂由多个关节连接而成,每个关节可以沿特定的轴向旋转或移动,使机器人能够在三维空间内灵活操作。
2、传感器与感知
工业机器人通常配备各种传感器,以获取环境信息和反馈数据。常见的传感器包括视觉传感器、力传感器、位置传感器等。视觉传感器用于识别和定位物体,力传感器可以测量机器人与物体之间的力和压力,位置传感器则用于确定机器人的位置和姿态。
3、运动控制与路径规划
工业机器人的运动是通过计算机控制系统来实现的。计算机控制系统根据输入的指令和传感器反馈的信息,计算出机器人的运动轨迹和控制信号。路径规划算法用于确定机器人从起始点到目标点的最优路径,同时考虑避障和碰撞等因素,确保机器人的安全和效率。
4、自动化与编程
工业机器人的自动化程度很高,它们可以根据预先设定的程序自动执行任务。机器人的编程可以通过离线编程或在线编程实现。离线编程是在计算机上进行,将任务的运动路径和动作指令预先设定好,然后上传给机器人执行。在线编程是在机器人操作台上进行,通过操纵机器人进行实时编程。
5、应用领域与前景
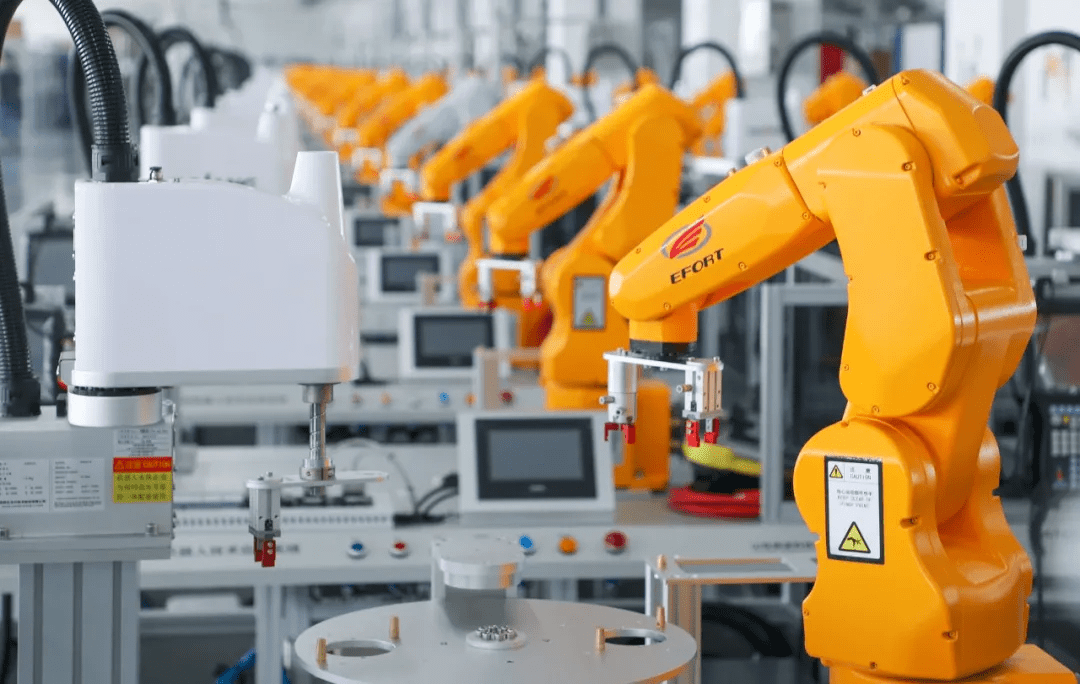
工业机器人广泛应用于制造业的各个领域,如汽车制造、电子制造、食品加工等。它们可以完成装配、焊接、喷涂、搬运等重复性和精细度要求高的任务。随着人工智能和机器学习的发展,工业机器人正变得更加智能和灵活,能够自主学习和适应新的任务和环境。
这些原理的相互作用使工业机器人能够高效地完成各种任务,提高生产效率和质量。随着技术的不断进步,工业机器人在制造业中的应用前景将更加广阔。






发表评论 取消回复